Shot Peening of landing gear components
Description:
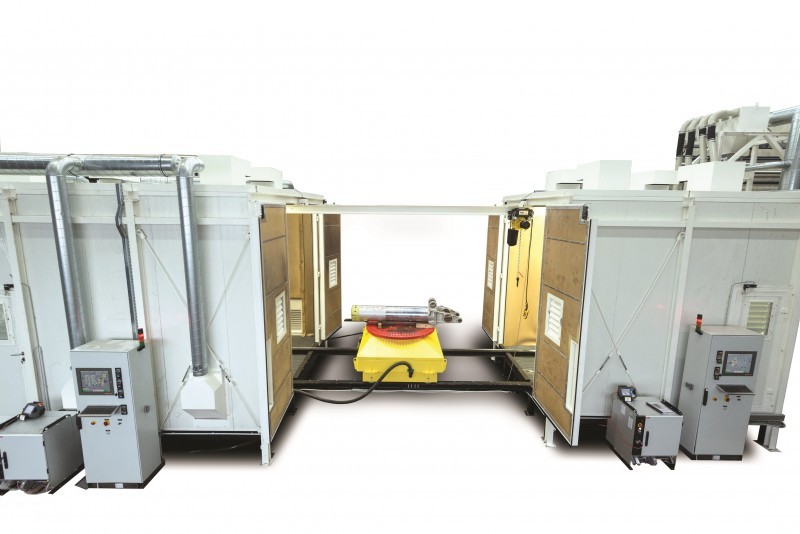
This large robotic shot peen system with two separate chambers (ARSP&ARGB) is designed to peen the ID and OD surfaces of a range of landing gear components. The parts are loaded and manipulated using an integral machine mounted hoist connecting both chambers and can be rotated or indexed on the precise servo turntables.
Technical Data:
Two Chamber Design
As landing gear components come in different sizes, materials and therefore different requirements for peening results that exceed the capabilities of a single machine a double robotic chamber was adopted as a complete solution.
N strip chamber (ARGB)
One chamber is equipped with a peening system suitable for achieving results in the range of Almen N-Strip using glass peening media. Commonly for lightweight media is the pneumatic media collecting and transport system used also benefiting in low maintenance while less mechanical components are being used as in mechanical systems.
For media mass control all new MAGNAVALVES for non-ferrous media is installed thus solving long time problem of regulating Glass media flow. Two Magnavalves are working in combination with double pressure vessel and feeding two robotic manipulated nozzles, one standard and one rotating lance for ID.
A strip chamber (ARSP)
The second chamber is optimized for achieving intensities of Almen A-Strip range using two different sizes of highly effective SCCW media. A-Strip chamber is equipped with standard components for process control such as Magnavalves, proportional air pressure controller and SCADA along with industrial robotic manipulator. For achieving a wide range of intensities throughout A-Strip range system for two different media sizes was integrated with the ability for fast automatic interchange between them without means of manual operation.
As a standard solution for heavy media collection and transport a mechanical system containing a full floor scrapping unit, screw transporter, and bucket elevator were adopted.
Applications:
Challenging Geometry
Keeping in mind challenging geometries of typical landing gear components customized multiple tooling systems was developed. For smallest and most precise ID a robotic manipulated rotating lance was installed. Lance design incorporates servo mechanism always driving small lance with a stable preset value of RPM. This combining with accurate indexing table presents an ideal solution not only for landing gear ID but also for other aerospace components such as LPTs or other objects containing small sized grooves and apertures. A large automatic horizontal rotating lance is programmed to peen the ID surfaces of largest parts
Inside tilt mounted and additionally protected ABB industrial robot manipulates a direct pressure nozzle or rotating lance drive to peen all outside surfaces providing large flexibility of functions and programming to operating engineers.
Work object manipulation and system flexibility
Complete system design was performed with special care for manipulation of components between both chambers. The idea was to provide a possibility of object loading, unloading and cross transfer with little manipulation as possible and without the necessity for external crane or hoist. Both chambers are interconnected with clever manipulation transport line consisting of rails for precise guidance and positioning of two trolleys and connecting hoist for object lifting.
Special attention was given to the design of each transport trolley. Trolleys are equipped with indexing turntables and powered through flexible power lines. Therefore complete trolley housing is also acting as anti-abrasive protection for all integrated turntable systems and installations below.
Inquiry
Other Products

Shot Peening of different kind of metal or alloy construction parts
ASP PEENLINE 4/1000 ECO



